

Шнекоход (рис. 1) - это вездеход, движение которою осуществляется посреством шнекороторного движителя. Конструкция такого транспортного средства представляет собой два винта или две пары винтов Архимеда, выполненных из особо прочного материала и установленных на жёсткой раме. Шнекоход очень хорошо зарекомендовал себя при езде по сыпучим и обводнённым грунтам, по песку, снегу. Он обладает способностью преодолевать крутые подъёмы, водные преграды. Однако шнек — движитель медлительный, расходующий энергию не только на перемещение транспортного средства, но и, увы, на повреждение грунта, по которому он движется, поэтому он непригоден для езды по асфальту или бетону. Для транспортировки шнекохода обычно используется специальная платфрорма.

Рис. 1.
Шнекоход
Первый патент на шнекоход был выдан в 1900 г. русскому изобретателю Ф. Дергинту. С той поры за создание шнекоходов брались конструкторы разных стран: Германии. Японии, в России семидесятых было выпущено несколько крупных машин такого типа, предназначенных для эвакуации космонавтов, приземлившихся в труднодоступных местах: Но из-за недостатков, присущих шнекоходам, идея их достаточно массового производства была заброшена на долгое время. И вот, по прошествии более ста лет, наши же русские разработчики вновь взялись за эту тематику, чтобы уже окончательно поставить в этом деле точку, свято веря, что шнекороторный движитель ещё не раскрыл себя полностью.
Главным было решить проблему самостоятельного передвижения шнекохода не только по бездорожью, но и по обычным шоссейным дорогам (естественно, не повреждая их покрытия).
Инновационная идея концепции Теш сводится к тому, чтобы с помощью механического устройства, так называемого элемента с управляемой геометрией, оперативно трансформировать шнек в ротор качения (рис. 2,а) и обратно, из катка в шнек (рис. 2,6). Так как каток может ездить по асфальту, перемещается быстрее и с меньшими энергозатратами, чем шнек, основным рабочим режимом станет режим качения, когда элемент расширен. При этом не только отпадает необходимость в специальной алатсрорме для перевозки шнекохода. но и сам движитель оказывается способен с места по любому фунту перемещаться в двух направлениях, чего не в состоянии продемонстрировать ни один из классических движителей: ни колёса, ни траки. Благодаря этому, шнекоход становится менее энергозатратным, обретает большую манёвренность и дополнительную живучесть.

Рис. 2.
Механизм управления геометрией межвиткового элемента при помощи процессов сжатия и расширения может действовать по двум схемам:
- Гидравлическая схема рабочее вещество — жидкость. Внутри ротора размещена нагнетающая установка, на привод ра главной силовой установки. Не исключается возможность размещения масляной станции на раме транспортного средства. Эта схема позволяет быстро переводить Теш из одного рабочего режима в другой и обратно. Предпочтительна в случае, когда угловая скорость вращения роторов невелика и необходимо часто изменять геометрию межвиткового заполнителя. Удобна для погрузо-разгрузочной техники:
- Пневматическая схема (реализована в прототипе), рабочее вещество — воздух, нагнетаемый компрессором, который может быть расположен как внутри винтового ротора, так и на раме транспортного средства, в то время как внутри ротора размещён ресивер. Более облегчённый вариант но сравнению с гидравлической схемой, позволяющий ротору вращаться с большей угловой скоростью. Схема предпочтительна для транспортных средств, перемещающихся по дорогам общего пользования, а также дтя амфибийных платформ, поскольку сообщает, при активном заполнителе, транспортному средству большую плавучесть.
Межвитковый элемент изготавливается из эластичного и износостойкого материала, например из армированной резины, и при повреждении или значительном износе заменяется на новый.
В режиме качения маневрирование осуществляется за счёт «складывания» полурам вокруг шарнирного соединения, либо, в случае монолитной рамы, за счёт перевода одного из Теш-драйвов в шнековый режим и его вращения, либо за счёт комбинации этих способов.
В зависимости от целей и условий, в которых будет работать проектируемая
техника с использованием Теш-движителя, возможны различные конфигурации
транспортного средства. Например, два ротора или четыре ротора (рис.
4) на двух шарнирно-сочленённых полурамах. Либо то же самое, но на
монолитной раме. Упрощённый вариант (рис. 5), когда на раме размещён
только один движитель Теш, работающий, в основном, в режиме качения, а второй
ротор является классическим шнеком. Такой вариант удешевляет изготовление и
обслуживание техники. Как альтернатива целому ротору возможен вариант, когда
ротор разделён посередине надвое (рис. 6), обе его половины крепятся на
одном валу, по бокам рамы, с единой системой управления изменением геометрии. В
этом случае у машины увеличивается клиренс, повышающий
проходимость.
Преимущества практического применения концепции Теш наглядно
демонстрируют иллюстрации работы породопогрузочных машин на проходке
горизонтальных горных выработок.
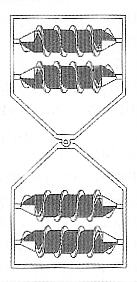
Рис. 4.
Схема установки четырёх роторов на шарнирно-сочленённых полурамах упрощенного
варианта: на раме один движитель Теш, работающий, в основном, в режиме качения,
и классический шнек
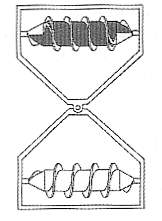
Рис. 5.
Схема упрощённого варианта:на раме один движитель Теш, работающий,в
основном, в режиме качения, и классический шнек

Рис. 6.
Разделение ротора на две части позволяет увеличить клиренс и повысить
проходимость
На рис. 7 показана ныне реально применяемая схема работы машины с колёсно-рельсовым приводом (такие до сих пор встречаются при строительстве метрополитена).

Рис. 7.
Схема работы ППМ с колесно-рельсовым приводом
Вторая схема (рис. 8) — работа машины с трансформируемыми шнеками Теш-драйв в
качестве движителя — существует пока только в воображении
разработчиков.
Задача породопогрузочной машины (ППМ) захватывать отбитую
породу и грузить её в вагонетки, находящиеся в смежной выработке (на рисунках не
показана). Колёсно-рельсовый привод позволяет ППМ собирать породу только перед
собой, в зоне, практически ограниченной шириной ковша. С боков же забоя
проходчикам приходится доставать породу вручную и перекидывать её в рабочую зону
ковша.

Рис. 8.
Работа ППМ с трансформируемыми шнеками Теш-драйва в качестве движителя
В отличие итиашии с колёсно-рельсовым приводом, ППМ на пневмоколесном или
гусеничном ходу способен обслуживать всю ширину забоя, но это требует большего
количества дополнительных манёвров, части которых, по мнению разработчиков
концепции Теш, можно было бы избежать при оснащении ППМ Теш-драйвами. Здесь
схема такая: при необходимости боковых смещений оба Теш-драйва работают в
шнеково.м режиме, затем переводятся в основной режим качения, порода забирается
и транспортируется к вагонетке. В этом случае рабочий цикл ППМ, как и любой
другой погрузо-разгрузочной машины, будет короче и позволит повысить КПД всего
процесса.
Повышенная живучесть, присущая шнекоходу, благодаря наличию
дополнительной степени свободы передвижения, позволяет ему самостоятельно
покинуть опасную зону даже при полном выходе из строя одного из Теш-драйвов. К
примеру, гусеничный привод в подобной ситуации (при разрыве трака) может только
крутиться на одном месте. В случае же описываемого движителя, когда машина
состоит из двух шарнирно-сочленённых полурам, можно отстыковать уцелевшую
половину (рис. 9) и вывезти экипаж на ней. При этом сохраняется
возможность маневрирования.
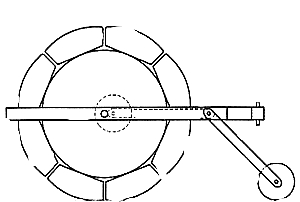
Рис. 9.
Аварийный режим. Схема отстыкованной половины машины с дополнительной опорой в
рабочем положении (вид сбоку)
Сильной стороной описываемого опорно-ходового элемента является пригодность его для создания амфибийных платформ, поскольку Теш-драйв это и поплавок, и винт, и, работая как водомёт, обеспечивает машине дополнительную плавучесть, устойчивость на воде и всепогодность. У всех амфибий проблемным бывает спуск на воду и выход обратно па сушу. Там, где берег крутой или обводнённые фунты, Теш-драйв может перейти из среды в среду, используя шнековый режим, позволяющий намного легче преодолевать эти препятствия. Выйдя на твёрдую почву, Теш переводится в режим качения и едет на «резиновом ходу» до следующей водной преграды.

Шнекоход-амфибия
на резиновом ходу
Совокупность свойств, которые приобретает транспорт, благодаря Теш-драйвам, позволяет рассматривать возможность использования концепции Теш для создания военной техники.
Вместе с тем, одной из дополнительных областей применения концепции может стать индустрия развлечений, создание линейки транспортных игрушек, радиоуправляемых моделей.
Источник: журнал "Техника молодежи", №915, декабрь
2009,
стр. 6-7, автор статьи Алексей Бурдин
